Linux on Ipaq
Palm Pilot Robot Kit (PPRK)
General reference
Links
Ipaq Robot with Indoor Positioning
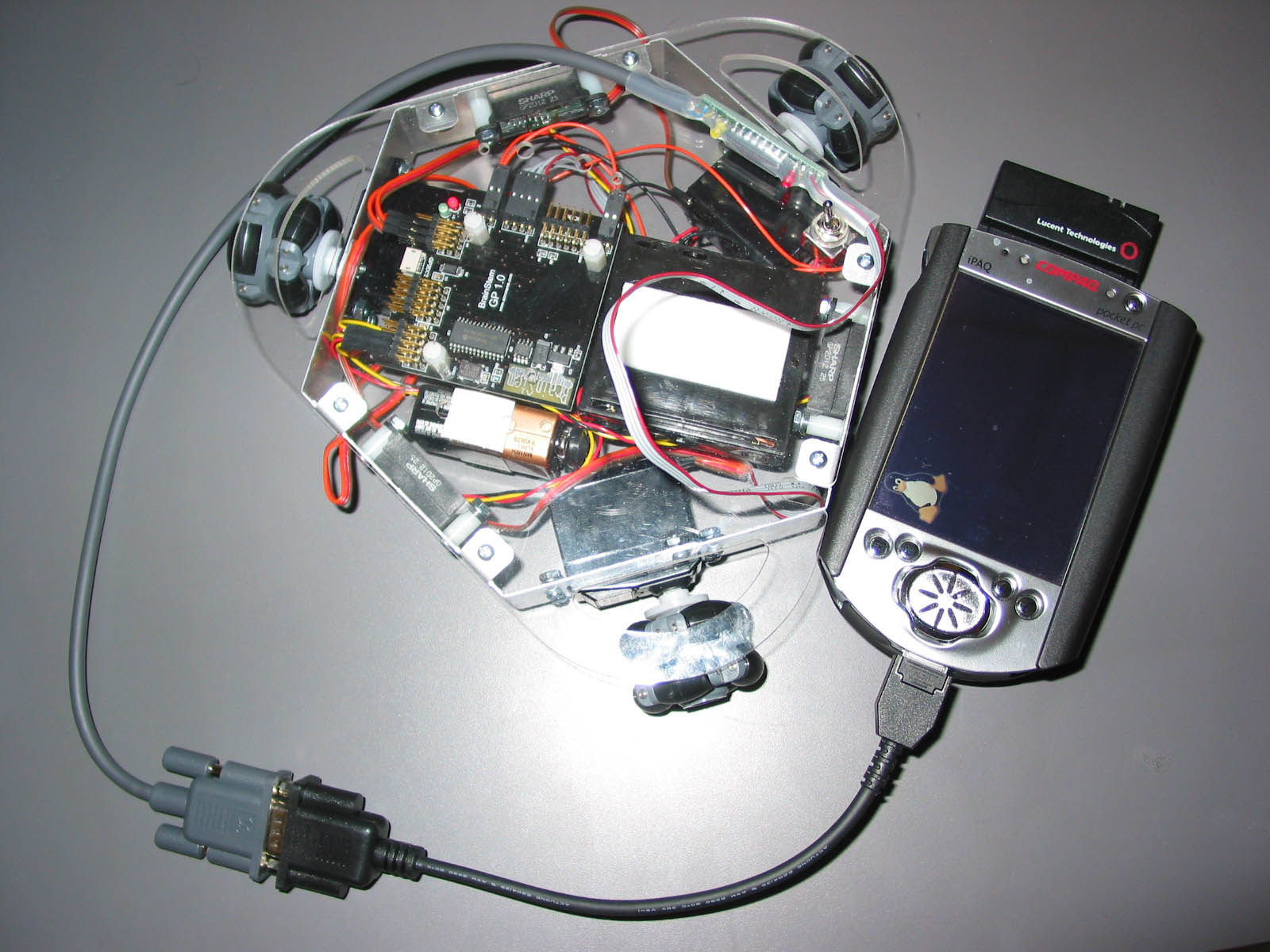
My project has a few parts
- Use an iPaq to control a robot
- Control the iPaq over the internet (via a wireless card)
- Add positioning (my project from last semester)
Source code (tar.gz)
Linux on the Ipaq (Familiar)
- Login: root, password: rootme
- For PPP, use login: ppp, no password
- You can save and load an "image" of the file system, and clone it to other iPaqs
- Easy to save/restore working configurations
- I will post a configuration for this project once I get it working
- Execute rz on ipaq (receive file with zmodem protocol), the iPaq begins waiting
- In Hyperterminal, do Transfer->send file (select zmodem), browse for file and send
- Minicom is the Linux version of Hyperterminal
- .ipk files are called packages (ipkg), and used to install programs
- Execute ipkg install myfile.ipk
- If you have an internet connection (wireless or PPP) then you can grab packages off the web, even ones you don't have
- ipkg install bash.ipk to install the bash shell
- It will look at the sources defined in the ipk configuration file (
- To add a URL, add the line src http://www.myurl.com/packages/ipk to the list
- If you have no internet connection
- Download the packages onto your computer
- Transfer .ipk to the ipaq
- Execute ipkg install myfile.ipk
- This is a nice microcontroller with a serial connection
- Has analog and digital I/O pins to interact with motors and sensors
- Can store and execute programs written in a language called TEA, a subset of C
- It can act as a slave device, controlled via the serial port
- External program gives it commands
- Brainstem sets output pins, or returns readings from input pins
- For me, the Brainstem is a slave of the iPaq
- The iPaq is controlled over the internet (using a wireless card)
- Commands given over internet will control motors
Serial port communications (giving commands to the Brainstem)
- You can buy an iPaq to rs232 cable, or use the hotsync cradle
- Talking to the serial port is just like opening up a regular file (I didn't know this, I like this abstraction of Unix)
- Tutorial
- Use /dev/ttySA0 in the iPaq (this is the serial port on the bottom, where the hotsync cradle connects)
- Example code
If you have a question, google will
find the answer. Look in the newsgroups
as well.
Ipaq FAQs
handhelds.org - main resource
for the Linux on the iPaq
acroname.com - info about the
brainstem and Palm Pilot Robot Kit (PPRK)